|
گروه صنعتی سی ان سی کاران |
شیراز اصفهان ارومیه بندرعباس کرج بجنورد RADONIX Imaster_Inverter JMC_Servo |
|
گروه صنعتی سی ان سی کاران |
شیراز اصفهان ارومیه بندرعباس کرج بجنورد RADONIX Imaster_Inverter JMC_Servo |
|
|
دایره المعارف 101 مدل سی ان سیدستگاه سی و سوم : ربات انسان نماجامع ترین مرکز اطلاع رسانی سی ان سی در ایران |
|
|
لیست مطالب در بخش تکنیکهای ساخت CNC |
|||||||||
|
مقدمه ای بر سرو موتور و استپ موتور میز دستگاه ، اسپیندل موتور ، انرژی چین فروشگاه قطعات سی ان سی و اتوماسیون صنعتی ================= ___________________________
تماس : 09122277199 شخم
گر |
فصل 33 - رباتهای انسان نما
چندی است که انسانها تلاش دارند تا با درست کردن رباتها در غالب انسان به نوعی تکنولوژی را به سمت و سویی دیگر سوق دهند . یکی از این دلایل رخ نمایی تکنولوژیکی شرکتهای پیشرو می باشند اما از دلایل دیگر استفاده ابزاری از رباتهای انسان نما جهت استفاده در مکان های خاص ( شیمیایی ، بدون شرایط زندگی مثل فضا ، کاربرد جنگ ها و ... ) می باشد.
ایران هم در این زمینه دست به اقدامات جالبی زده است و پیشرفتهایی در این زمینه
حاصل کرده است .سورنا ۳ با قدی برابر با ۱۹۰ سانتی متر و وزنی در حدود ۹۸ کیلوگرم
در زمره روباتهای انساننما با اندازه واقعی انسان بالغ قرار میگیرد. این روبات
در مقایسه با سورنای۲ پیشرفتهای قابل ملاحظهای به شرح زیر داشته است:
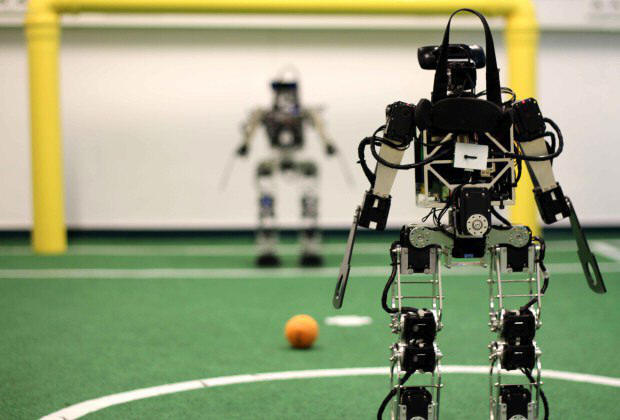
ربات انسان نمای ایرانی سورنا3 https://www.aparat.com/v/5tA09 برای افزایش سطح توانمندی رباتها در حوزهای مختلف نظیر دینامیک حرکت ، هوش مصنوعی و ... مسابقات رباتیک در سراسر جهان برگزار می شود که از مهمترین مسابقات رباتیک ، رباتهای فوتبالیست می باشند.
مسابقات رباتهای فوتبالیست
تفکر مبتنی بر اندیشه ربات در جامعه ما به شدت رو به رشد است و مدارس نیز در این مورد وارد کار شده اند و حتی آموزش ساخت ربات را به سن 4 تا 9 سال نیز کشانده اند
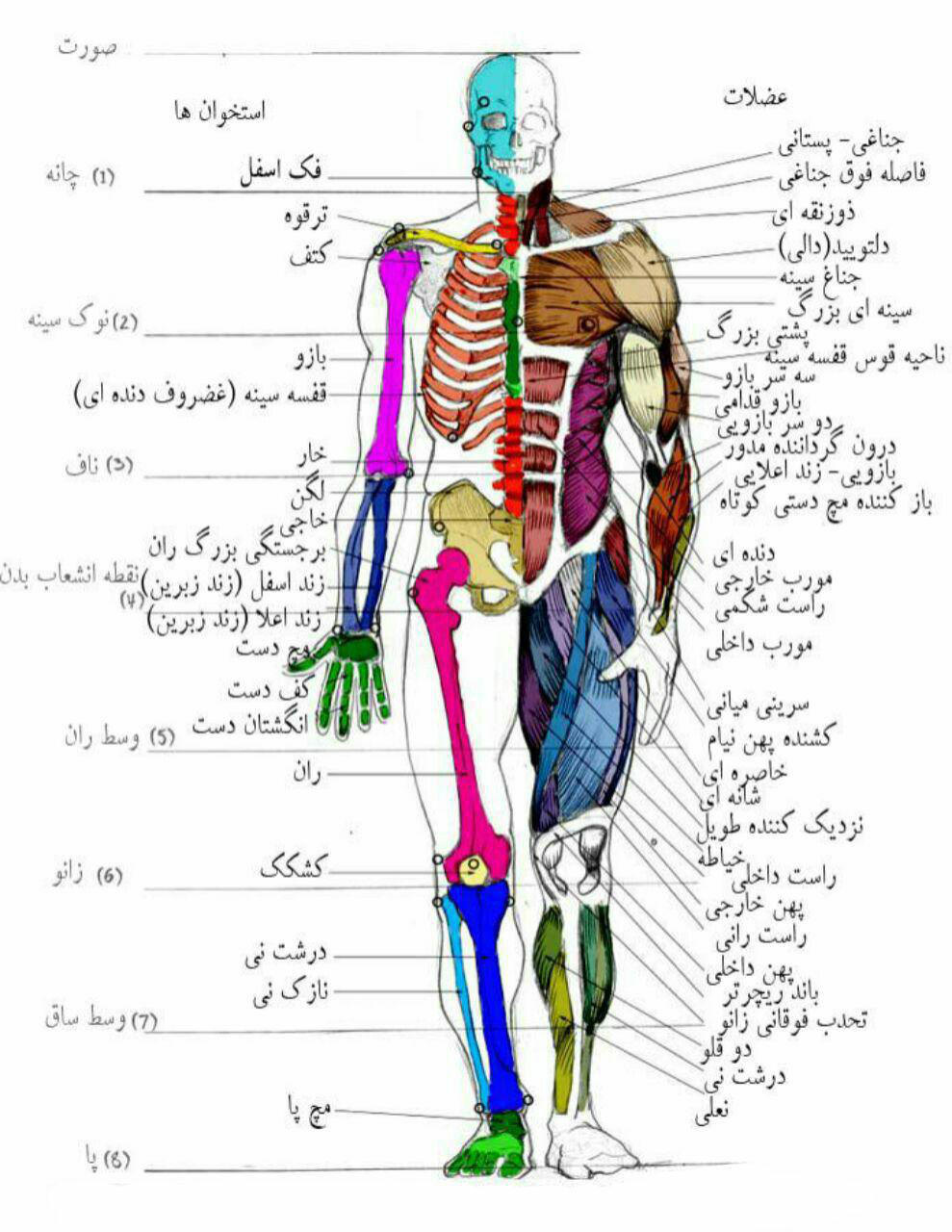
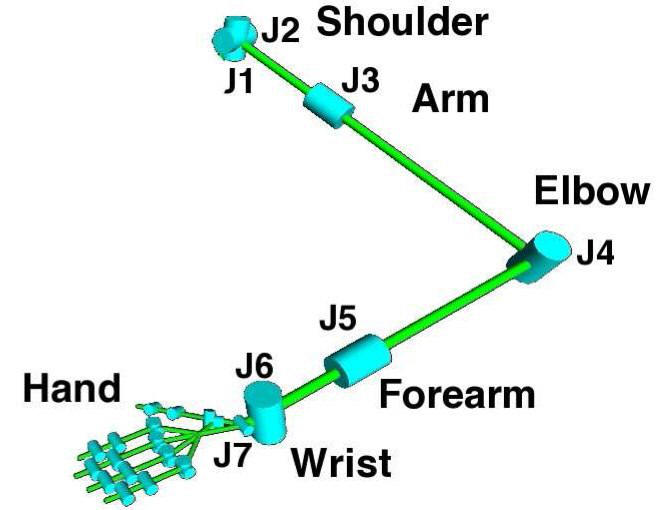
یکی از موارد بسیار مهم در ساخت رباتهای انسان نما شناخت کامل از آناتومی بدن انسان است
اسکلت که حکم بازوها را ایجاد می کنند و ماهیچه ها که وظیفه محرک ها را بر عهده دارند . سیستم عصبی همان کابل های انکودر و فیدبک ما هستند و مغز یک کنترلر با سرعت پروسس بسیار بالا و تعداد ورودی خروجی خیلی خیلی بالا از قطعات بکار رفته در انسان هستند یک بازو در اولین مشخصه خود به تعداد درجه آزادی شناخته خواهد شد . یک ربات 6 درجه آزادی ، دارای 6 موتور محرک مستقل می باشد که هرکدام می توانند بصورت مجزا حرکت کنند .
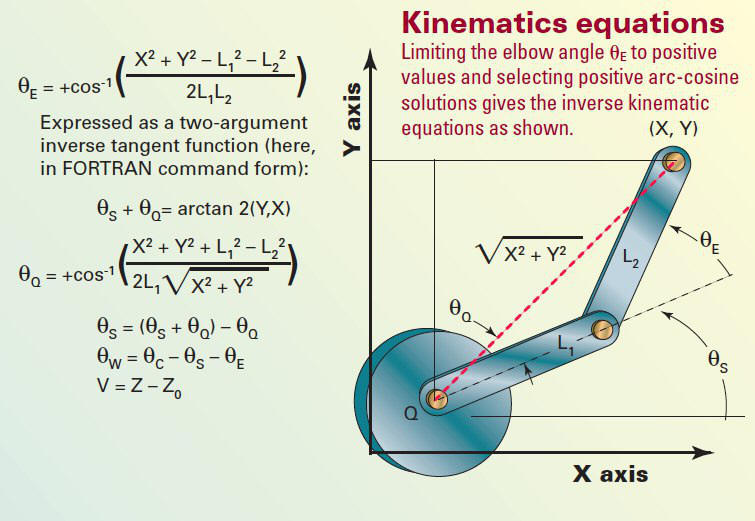
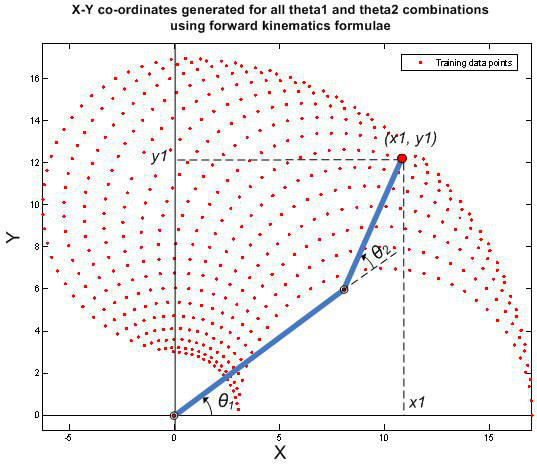
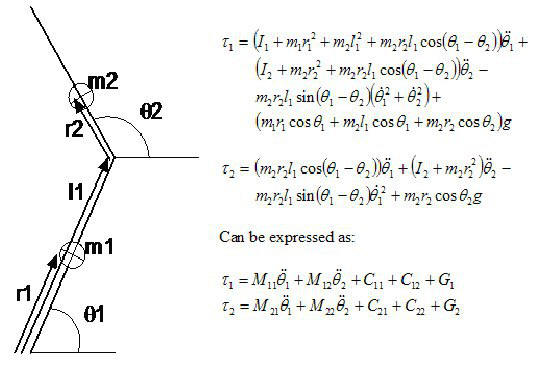
در ابتدا ما باید مکان حرکت را در رباتها تعیین کنیم. اینکه بازوی ما می خواهد در چه محدوده فضایی حرکت کند. برای اینکار نیاز به دانستن علم سینماتیک داریم
زمانیکه تعداد لینک ها بیشتر شود دامنه حرکتی متفاوت تر و محاسبات نیز پیچیده تر می شود
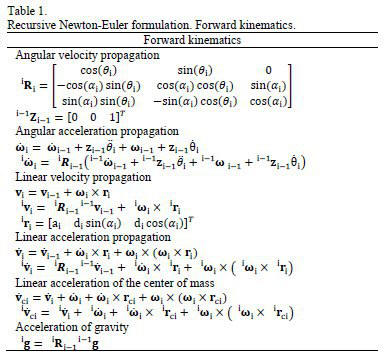
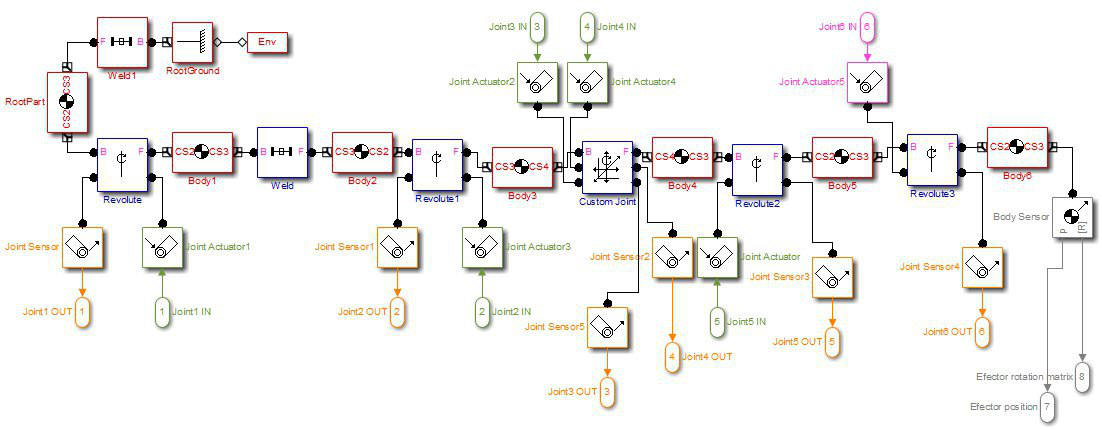
Analysis of Robotic System Motion in SimMechanics and MATLAB GUI Environment
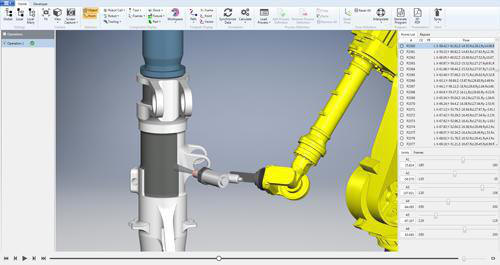
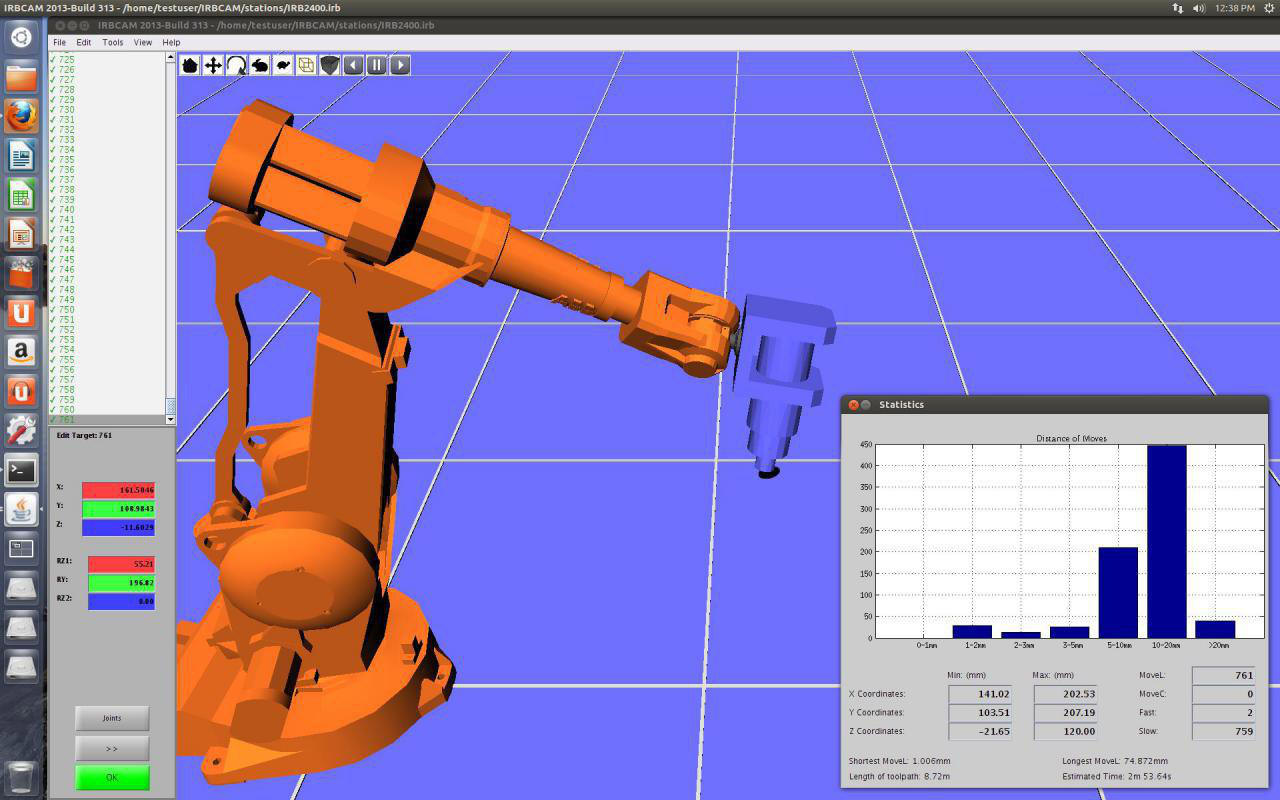
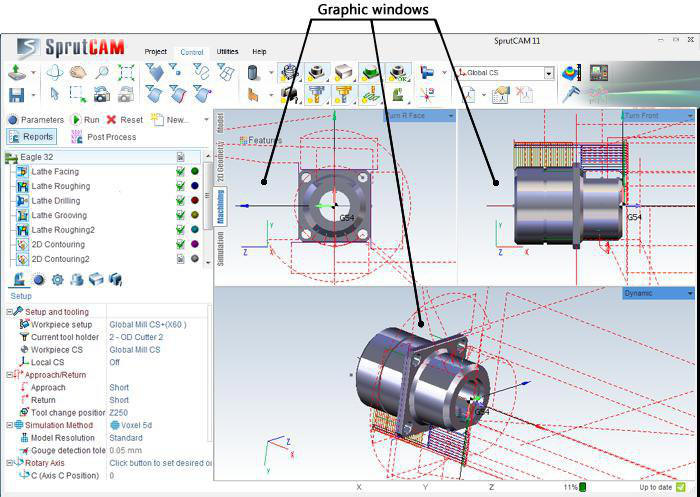
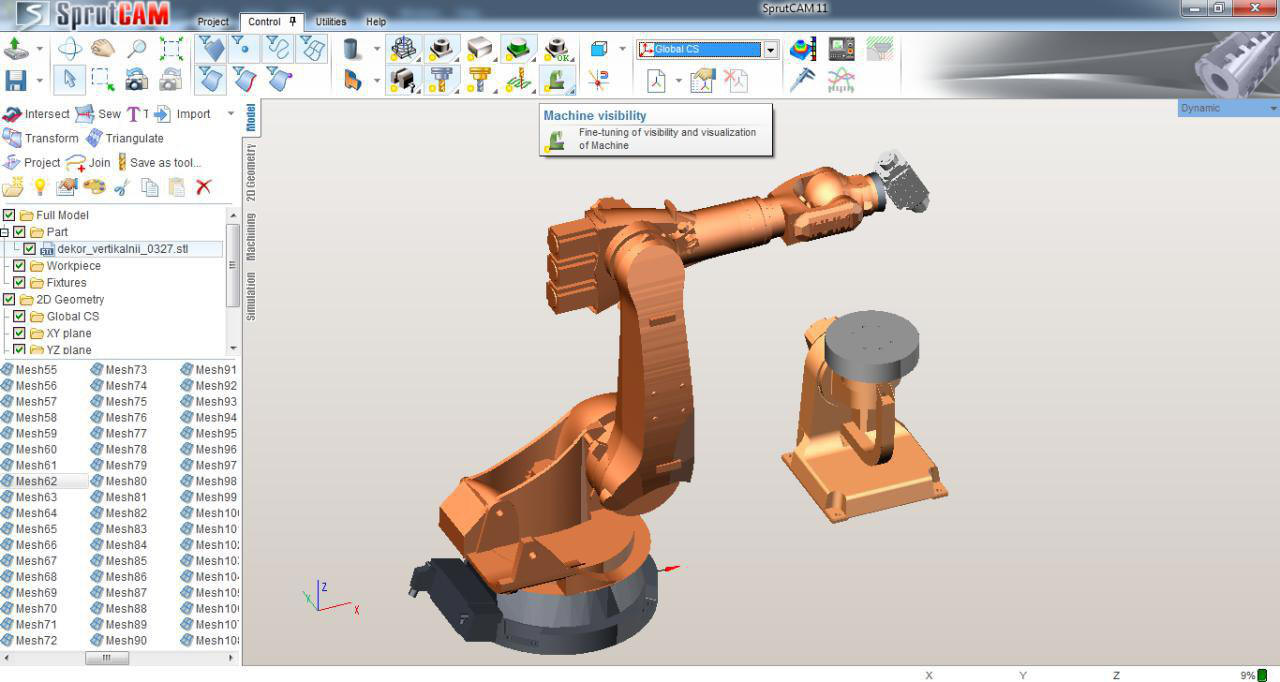
اما ما نباید خیلی نگران این فرمولهای پیچیده باشیم . نرم افزاهای زیادی برای این قضیه وارد بازار صنعت شده اند که مشکل ما را بصورت حرفه ای حل نموده اند
اینها همه مربوط به یک بازو می باشد . زمانیکه بازوی دوم و سر و سینه و پا و تعادل و ... وارد می شود یک مقدار معادلات پیچیده تر می شود
|
دایره المعارف 101 مدل سی ان سی |
|
گروه صنعتی سی ان سی کاران . www.cnckaran.com shokhmgar@gmail.com همراه: 09122277199 شخم گر تلفن پاسخگو : 55448574 - 021 فکس: 55448579 - 021 تلگرام : گروه سی ان سی کاران |
|
آمار سایت |
ارتباط با ما |
فعالیتها |
گروه صنعتی سی ان سی کاران |
|
|
همراه : پرقوه ماشین آلات چوب 09028532966 منصوری ماشین آلات 09196240385 چراتی ماشین آلات سنگ 09194829553 یوسفی مدیریت فروش 09196341876 احمد شخم گر مدیریت 09122277199 تلگرام: گروه سی ان سی کاران ایمیل : shokhmgar@gmail.com وب : www.cnckaran.com |
حوزه فعاليت ساخت : سي ان سي هاي
چوب سه محور در سايزهاي كوچك ، متوسط و بزرگ |
درباره ما تماس با ما قطعات سی ان سی ماشین آلات سی ان سی روش ساخت سی ان سی فروش تکنولوژی ساخت
|